Tato odpověď vysvětluje následující:
- Proč je vždy možné dokonalé oddělení s odlišnými body a Gaussovým jádrem (dostatečně malé šířky pásma)
- Jak může být toto oddělení interpretováno jako lineární, ale pouze v abstraktním prostoru funkcí odlišném od prostoru, kde žijí data
- Jak je „nalezeno“ mapování z datového prostoru do prostoru funkcí. Spoiler: není nalezen SVM, je implicitně definován zvoleným jádrem.
- Proč je prostor funkcí nekonečně rozměrný.
1. Dosažení dokonalého oddělení
Dokonalé oddělení je u gaussovského jádra vždy možné (za předpokladu, že žádné dva body z různých tříd nejsou vždy úplně stejné) kvůli vlastnostem jádra, které vedou k libovolně flexibilní hranici rozhodování. Pro dostatečně malou šířku pásma jádra bude hranice rozhodování vypadat, jako byste právě nakreslili malé kruhy kolem bodů, kdykoli jsou potřeba k oddělení pozitivních a negativních příkladů:
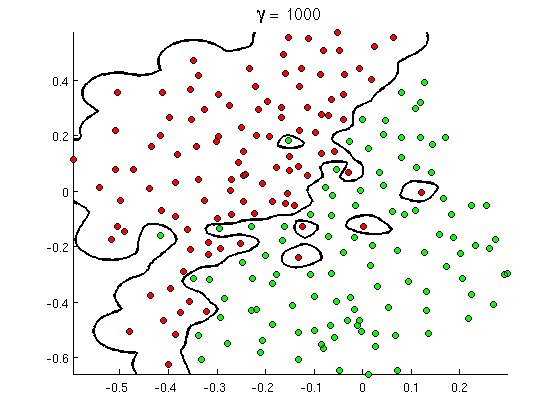
(Uznání: Online kurz strojového učení Andrewa Nga).
Proč k tomu tedy dochází z matematické perspektivy?
Zvažte standardní nastavení: máte gaussovské jádro $ K (\ mathbf {x}, \ mathbf {z}) = \ exp (- || \ mathbf {x} - \ mathbf {z} || ^ 2 / \ sigma ^ 2) $ a tréninková data $ (\ mathbf {x} ^ {(1)}, y ^ {(1)}), (\ mathbf {x} ^ {(2)}, y ^ {(2)}), \ ldots, (\ mathbf {x} ^ {(n)}, y ^ {(n)}) $ kde hodnoty $ y ^ {(i)} $ jsou $ \ pm 1 $. Chceme se naučit funkci klasifikátoru
$$ \ hat {y} (\ mathbf {x}) = \ sum_i w_i y ^ {(i)} K (\ mathbf {x} ^ {(i )}, \ mathbf {x}) $$
Jak teď budeme přiřadit váhy $ w_i $? Potřebujeme nekonečné dimenzionální prostory a kvadratický programovací algoritmus? Ne, protože chci jen ukázat, že umím dokonale oddělit body. Takže $ \ sigma $ miliardkrát menší než nejmenší oddělování $ || \ mathbf {x} ^ {(i)} - \ mathbf {x} ^ {(j)} || $ mezi libovolnými dvěma příklady tréninku, a právě jsem nastavil $ w_i = 1 $. To znamená, že pokud jde o jádro, všechny tréninkové body jsou od sebe vzdáleny miliardu sigmat a každý bod zcela ovládá znaménko $ \ hat {y} $ v jeho sousedství. Formálně máme
$$ \ hat {y} (\ mathbf {x} ^ {(k)}) = \ sum_ {i = 1} ^ ny ^ {(k)} K (\ mathbf {x} ^ {(i)}, \ mathbf {x} ^ {(k)}) = y ^ {(k)} K (\ mathbf {x} ^ {(k)}, \ mathbf {x} ^ {(k)}) + \ sum_ {i \ neq k} y ^ {(i)} K (\ mathbf {x} ^ {(i)}, \ mathbf {x} ^ {(k)}) = y ^ {(k)} + \ epsilon $$
kde $ \ epsilon $ je libovolně malá hodnota. Víme, že $ \ epsilon $ je malý, protože $ \ mathbf {x} ^ {(k)} $ je miliarda sigmat od jakéhokoli jiného bodu, takže pro všechny $ i \ neq k $ máme
$$ K (\ mathbf {x} ^ {(i)}, \ mathbf {x} ^ {(k)}) = \ exp (- || \ mathbf {x} ^ {(i)} - \ mathbf { x} ^ {(k)} || ^ 2 / \ sigma ^ 2) \ přibližně 0. $$
Protože $ \ epsilon $ je tak malý, $ \ hat {y} (\ mathbf { x} ^ {(k)}) $ má určitě stejné znaménko jako $ y ^ {(k)} $ a klasifikátor dosahuje dokonalé přesnosti tréninkových dat.
2. Učení jádra SVM jako lineární separace
Skutečnost, že to lze interpretovat jako „dokonalé lineární oddělení v nekonečném prostoru dimenzionálních funkcí“, pochází z triku jádra, který umožňuje interpretovat jádro jako vnitřní produkt v a (potenciálně nekonečně-dimenzionální) prostor funkcí:
$$ K (\ mathbf {x} ^ {(i)}, \ mathbf {x} ^ {(j)}) = \ langle \ Phi (\ mathbf {x} ^ {(i)}), \ Phi (\ mathbf {x} ^ {(j)}) \ rangle $$
kde $ \ Phi (\ mathbf {x} ) $ je mapování z datového prostoru do prostoru funkcí. Z toho okamžitě vyplývá, že funkce $ \ hat {y} (\ mathbf {x}) $ funguje jako lineární funkce v prostoru funkcí:
$$ \ hat {y} (\ mathbf {x}) = \ sum_i w_i y ^ {(i)} \ langle \ Phi (\ mathbf {x} ^ {(i)}), \ Phi (\ mathbf {x}) \ rangle = L (\ Phi (\ mathbf {x})) $$
kde lineární funkce $ L (\ mathbf {v}) $ je definována na vektorech prostorového prostoru $ \ mathbf {v} $ as
$$ L (\ mathbf {v}) = \ sum_i w_i y ^ {(i)} \ langle \ Phi (\ mathbf {x} ^ {(i) }), \ mathbf {v} \ rangle $$
Tato funkce je lineární v $ \ mathbf {v} $, protože je to jen lineární kombinace vnitřních produktů s pevnými vektory. V prostoru funkcí je hranice rozhodnutí $ \ hat {y} (\ mathbf {x}) = 0 $ pouze $ L (\ mathbf {v}) = 0 $, sada úrovní lineární funkce. Toto je samotná definice nadroviny v prostoru funkcí.
3. Porozumění mapování a prostoru funkcí
Poznámka: V této části se odkazuje na $ \ mathbf {x} ^ {(i)} $ libovolná sada $ n $ bodů a ne tréninková data. To je čistá matematika; tréninková data do této sekce vůbec nefigurují!
Metody jádra nikdy ve skutečnosti „nenaleznou“ nebo „nevypočítají“ prostor funkcí nebo mapování $ \ Phi $ explicitně. Metody učení jádra, jako je SVM, nepotřebují, aby fungovaly; potřebují pouze funkci jádra $ K $.
To znamená, že je možné zapsat vzorec pro $ \ Phi $. Prostor funkcí, na který $ \ Phi $ mapuje, je jaksi abstraktní (a potenciálně nekonečně dimenzionální), ale v zásadě mapování používá pouze jádro k provádění jednoduchého inženýrství funkcí. Pokud jde o konečný výsledek, model, který se nakonec naučíte používat jádra, se nijak neliší od tradičního inženýrství funkcí, které se běžně používá v lineární regrese a modelování GLM, jako je převzetí protokolu pozitivní proměnné prediktoru před jeho vložením do regresního vzorce. Matematika je většinou právě tam, aby se ujistil, že jádro dobře hraje s algoritmem SVM, který má své vychvalované výhody sparsity a škálování na velké datové sady.
Pokud máte stále zájem, funguje to takto. V podstatě vezmeme identitu, kterou chceme držet, $ \ langle \ Phi (\ mathbf {x}), \ Phi (\ mathbf {y}) \ rangle = K (\ mathbf {x}, \ mathbf {y}) $ , a zkonstruovat prostor a vnitřní produkt tak, že drží podle definice. Za tímto účelem definujeme abstraktní vektorový prostor $ V $, kde každý vektor je funkcí z prostoru, ve kterém data žijí, $ \ mathcal {X} $, na reálná čísla $ \ mathbb {R} $. Vektor $ f $ v $ V $ je funkce vytvořená z konečné lineární kombinace řezů jádra: $$ f (\ mathbf {x}) = \ sum_ {i = 1} ^ n \ alpha_i K (\ mathbf {x } ^ {(i)}, \ mathbf {x}) $$ Je vhodné psát $ f $ kompaktněji jako $$ f = \ sum_ {i = 1} ^ n \ alpha_i K _ {\ mathbf {x} ^ {(i)}} $$ kde $ K_ \ mathbf {x} (\ mathbf {y}) = K (\ mathbf {x}, \ mathbf {y}) $ je funkce poskytující "řez" jádra at $ \ mathbf {x} $.
Vnitřní produkt v prostoru není obyčejný bodový produkt, ale abstraktní vnitřní produkt založený na jádře:
$$ \ langle \ sum_ {i = 1} ^ n \ alpha_i K _ {\ mathbf {x} ^ {(i)}}, \ sum_ {j = 1} ^ n \ beta_j K _ {\ mathbf {x} ^ {(j)} } \ rangle = \ sum_ {i, j} \ alpha_i \ beta_j K (\ mathbf {x} ^ {(i)}, \ mathbf {x} ^ {(j)}) $$
S takto definovaným prostorem funkcí je $ \ Phi $ mapování $ \ mathcal {X} \ rightarrow V $, přičemž každý bod $ \ mathbf {x} $ je v tomto bodě převeden na "řez jádra":
$$ \ Phi (\ mathbf {x}) = K_ \ mathbf {x}, \ quad \ text {kde} \ quad K_ \ mathbf {x} (\ mathbf {y}) = K (\ mathbf {x}, \ mathbf {y}). $$
Můžete dokázat, že $ V $ je vnitřní produktový prostor, když $ K $ je pozitivní definitivní jádro. Podrobnosti najdete v tomto příspěvku. (Kudos až f coppens, že na to upozornili!)
4. Proč je prostor funkcí nekonečně rozměrný?
Tato odpověď poskytuje pěkné vysvětlení lineární algebry, ale zde je geometrická perspektiva s intuicí i důkazem.
Intuice
Pro jakýkoli pevný bod $ \ mathbf {z} $ máme funkci řezu jádra $ K_ \ mathbf {z} (\ mathbf {x}) = K (\ mathbf {z}, \ mathbf {x}) $. Graf $ K_ \ mathbf {z} $ je pouze Gaussův hrbolek soustředěný na $ \ mathbf {z} $. Pokud by byl prostor funkcí pouze konečný rozměr, znamenalo by to, že bychom mohli vzít konečnou množinu hrbolek na pevnou množinu bodů a vytvořit jakýkoli Gaussův hrbolek kdekoli jinde. Ale zjevně neexistuje způsob, jak to udělat; ze starých hrbolů nemůžete udělat nový hrbolek, protože nový hrb může být opravdu daleko od těch starých. Takže bez ohledu na to, kolik máme vektorů rysů (hrboly), můžeme vždy přidat nové hrboly a v prostoru rysů jsou to nové nezávislé vektory. Takže prostor funkcí nemůže být konečný rozměrný; musí to být nekonečné.
Důkaz
Používáme indukci. Předpokládejme, že máte libovolnou množinu bodů $ \ mathbf {x} ^ {(1)}, \ mathbf {x} ^ {(2)}, \ ldots, \ mathbf {x} ^ {(n)} $ takové, že vektory $ \ Phi (\ mathbf {x} ^ {(i)}) $ jsou v prostoru funkcí lineárně nezávislé. Nyní najděte bod $ \ mathbf {x} ^ {(n + 1)} $ odlišný od těchto $ n $ bodů, ve skutečnosti od nich všech miliard sigmat. Tvrdíme, že $ \ Phi (\ mathbf {x} ^ {(n + 1)}) $ je lineárně nezávislé na prvních $ n $ vektorech funkcí $ \ Phi (\ mathbf {x} ^ {(i)}) $ .
Důkaz rozporem. Předpokládejme naopak, že
$$ \ Phi (\ mathbf {x} ^ {(n + 1)}) = \ sum_ {i = 1} ^ n \ alpha_i \ Phi (\ mathbf {x} ^ {(i)}) $$
Nyní vezměte vnitřní produkt na obě strany s libovolným $ \ mathbf {x} $. Identitou $ \ langle \ Phi (\ mathbf {z}), \ Phi (\ mathbf {x}) \ rangle = K (\ mathbf {z}, \ mathbf {x}) $ získáme
$$ K (\ mathbf {x} ^ {(n + 1)}, \ mathbf {x}) = \ sum_ {i = 1} ^ n \ alpha_i K (\ mathbf {x} ^ {(i )}, \ mathbf {x}) $$
Zde je $ \ mathbf {x} $ volná proměnná, takže tato rovnice je identita, která uvádí, že dvě funkce jsou stejné. Zejména říká, že Gaussian se středem na $ \ mathbf {x} ^ {(n + 1)} $ může být reprezentován jako lineární kombinace Gaussianů v jiných bodech $ \ mathbf {x} ^ {(i)} $ . Je geometricky zřejmé, že nelze vytvořit Gaussův hrbolek soustředěný v jednom bodě z konečné kombinace Gaussianských hrbolek soustředěných v jiných bodech, zvláště když jsou všechny ostatní Gaussovy hrboly vzdálené miliardu sigmat. Náš předpoklad lineární závislosti tedy vedl k rozporu, jak jsme se rozhodli ukázat.